∇-Nabla: Numerical Analysis BAsed LAnguage
 |
 |
 |
 |
 |
 |
 |
 |
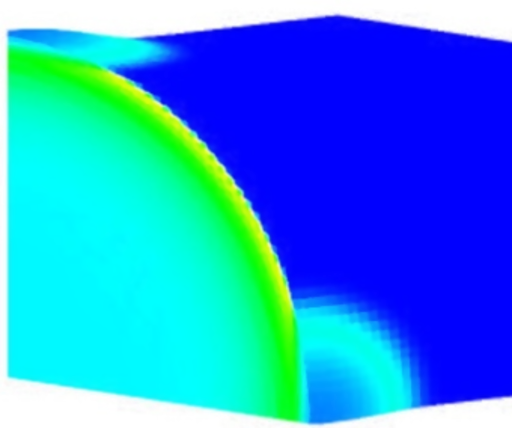
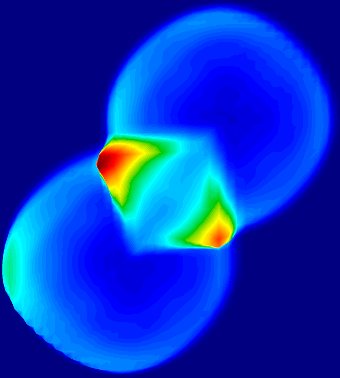
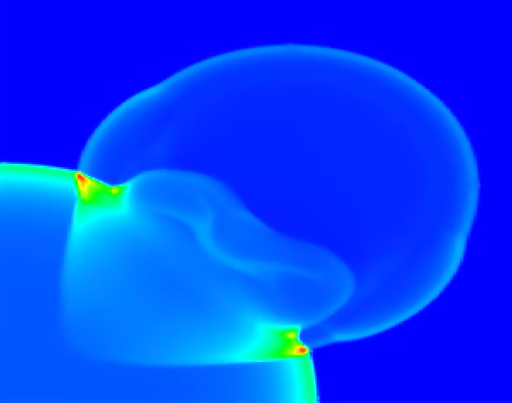
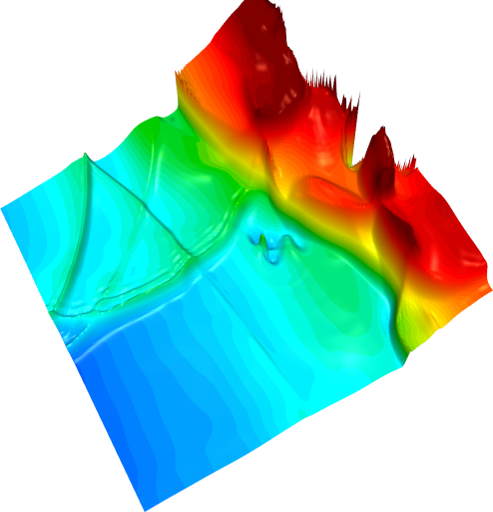
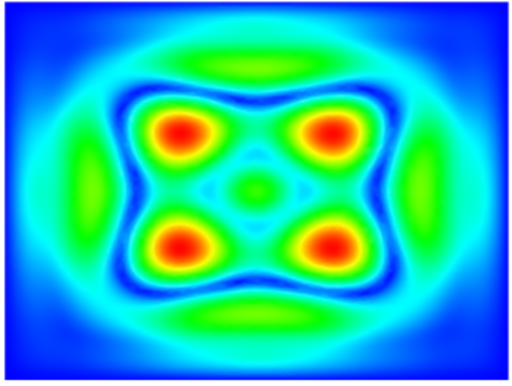
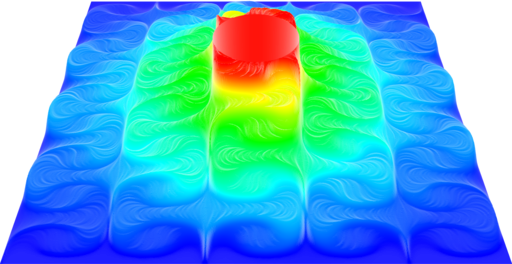
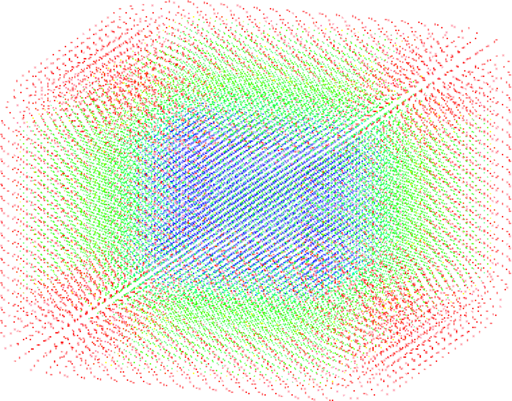
∇ DDFV
The DDFV method has proved to be efficient for approximating on general meshes a broad class of physical problems involving diffusion operators as well in 2D as in 3D.
with ℵ; // **************************************************************************** // * Déclaration des options // **************************************************************************** options{ ℾ option_quads = false; ℾ option_triangles = false; ℝ option_deltat = 0.001; ℝ option_deltat_factor = 10.0; ℝ option_theta_ini = 300.0; ℝ option_theta_hot = 700.0; ℕ option_max_iterations = 8; ℝ alephEpsilon = 1.e-10; ℕ alephUnderlyingSolver = 0; ℕ alephMaxIterations = 1024; ℕ alephPreconditionerMethod = 2; ℕ alephSolverMethod = 0; ℕ alephNumberOfCores = 0; ℾ option_aleph_dump_matrix = false; }; // **************************************************************************** // * Déclaration des variables aux mailles // **************************************************************************** cells{ ℝ cell_θ; ℝ cell_area; ℕ cell_nb_nodes; ℝ cell_mass_center; }; // **************************************************************************** // * Déclaration des variables aux noeuds // **************************************************************************** nodes{ ℝ node_θ; ℝ node_area; ℾ node_is_an_edge; }; // **************************************************************************** // * Déclaration des variables aux faces // **************************************************************************** faces{ ℝ face_θ; ℝ sdivs; ℝ α,β,δ,γ,σ; ℝ Cosθ,Sinθ; ℕ cellLowId; ℕ nodeLowId; }; // **************************************************************************** // * Déclaration des variables globales // **************************************************************************** global{ ℾ full_quads; ℾ full_triangles; }; // **************************************************************************** // * Partie d'initialisation ]-∞,-0[ // **************************************************************************** ∀ cells iniCells @ -10.0{ cell_nb_nodes=nbNode; cell_θ=option_theta_ini; } ∀ nodes iniNodes @ -10.0{ node_θ=option_theta_ini; } // **************************************************************************** // * Calcul des Aires // **************************************************************************** #define computeTriangleArea2D(a, b, c) (½*((b-a)⤫(c-a))) ∀ cells geomComputeTriangleSurface @ -10.0 if (option_triangles){ cell_area = computeTriangleArea2D(coord[0],coord[1],coord[2]); } ∀ cells geomComputeQuadSurface @ -10.0 if (option_quads){ const ℝ³ fst_edge = coord[2]-coord[0]; const ℝ³ snd_edge = coord[3]-coord[1]; cell_area=½*(fst_edge⤫snd_edge); } ∀ nodes nodeArea @ -9.0{ node_area=0.0; ∀ cell node_area+=cell_area/cell_nb_nodes; } // **************************************************************************** // * Calcul des Centres de Gravité // **************************************************************************** ∀ cells geomComputeCellTriangleMassCenter @ -10.0 if (option_triangles){ cell_mass_center=0.0; ∀ node cell_mass_center+=coord; cell_mass_center/=nbNode; } ∀ cells geomComputeCellQuadMassCenter @ -10.0 if (option_quads){ const ℝ³ s0 = coord[0]; const ℝ³ s1 = coord[1]; const ℝ³ s2 = coord[2]; const ℝ³ s3 = coord[3]; const ℝ³ c = ¼*(s0+s1+s2+s3); const ℝ surface[4]= { computeTriangleArea2D(s0,s1,c), computeTriangleArea2D(s1,s2,c), computeTriangleArea2D(s2,s3,c), computeTriangleArea2D(s3,s0,c)}; const ℝ³ barycentre_triangle[4] = {⅓*(s0+s1+c), ⅓*(s1+s2+c), ⅓*(s2+s3+c), ⅓*(s3+s0+c)}; ℝ total_surface = 0.0; ℝ³ center = ℝ³(0.0,0.0,0.0); ∀ node{ center += barycentre_triangle[#]*surface[#]; total_surface += surface[#]; } cell_mass_center = center / total_surface; } // **************************************************************************** // * Calculs géométriques des σ et sdivs // **************************************************************************** ∀ faces faceSbySigma @ -9.0{ ℝ³ fn0 = coord[0]; ℝ³ fn1 = coord[1]; ℝ s=norm(fn0-fn1); ℝ³ ccc0; ℝ³ ccc1; if (nbCell==2){ ccc0=cell_mass_center[frontCell]; ccc1=cell_mass_center[backCell]; } if (nbCell==1){ ccc0=cell_mass_center[0]; ccc1=(fn0+fn1)/2.; } σ=norm(ccc0-ccc1); if (σ==0.0) fatal("faceSbySigma", "σ==0.0"); sdivs=s/σ; } // **************************************************************************** // * Initialisation du δt en fonction des options // **************************************************************************** ∀ faces ℝ computeMin_σ(ℝ min_σ) in (face σ){ min_σ = min(min_σ,σ); return min_σ; } ini_δt @ -8.5{ if (option_deltat==0.0){ ℝ min_σ=computeMin_σ(+∞); ℝ reduced_min_σ = mpi_reduce(ReduceMin,min_σ); δt=reduced_min_σ/option_deltat_factor; }else δt=option_deltat; info()<< "\33[7m[ini_δt] δt="<<δt<<"\33[m"; } // **************************************************************************** // * Calculs géométriques des Cosθ,Sinθ // **************************************************************************** ∀ faces faceTheta @ -8.0{ ℝ³ n0=coord[0]; ℝ³ n1=coord[1]; ℝ³ c1,c0,τ,tan,nrm; ℝ sinTauTan,nrm_xτ,nΤ,nTan; if (nbCell==1){ c0=cell_mass_center[0]; c1=(n0+n1)/2.; cellLowId=cell(0).uniqueId(); }else{ if (backCellUid>frontCellUid){ c0=cell_mass_center[frontCell]; c1=cell_mass_center[backCell]; cellLowId=frontCell.uniqueId(); }else{ c0=cell_mass_center[backCell]; c1=cell_mass_center[frontCell]; cellLowId=backCell.uniqueId(); } } τ=(c1-c0); // Vecteur tangentiel des mailles nΤ=norm(τ); tan=(n1-n0); // Vecteur tangentiel des noeuds nTan=norm(tan); // Le sinus de ces deux vecteurs afin d'orienter la normale sinTauTan= (τ⤫tan)/(nΤ*nTan); nodeLowId=((sinTauTan>0.)?node(0).uniqueId():node(1).uniqueId()); nrm.x=-tan.y; nrm.y=+tan.x; nrm.z=0.; nrm*=(sinTauTan>0)?-1.:+1.; nrm_xτ=norm(nrm)*nΤ; Cosθ=dot(nrm,τ)/nrm_xτ; Sinθ=(nrm⤫τ)/nrm_xτ; } // **************************************************************************** // * updateAlphaBetaGammaDelta // **************************************************************************** ∀ faces updateAlphaBetaGammaDelta @ -7.0{ α = δt*sdivs/Cosθ; β = γ = δt*(-Sinθ/Cosθ); δ = δt*(1./(sdivs*Cosθ)); } // **************************************************************************** // * iniNodeIsAnEdge, iniOuterNodeIsAnEdge // **************************************************************************** ∀ nodes @ -6.0 { node_is_an_edge=false; } ∀ own outer nodes @ -5.0 { node_is_an_edge=true; } // **************************************************************************** // * Partie de calcul ]+0,+∞[ // **************************************************************************** rhsInit @ 1.0 { alephInitialize(); ℵ rhs reset; ℵ lhs reset; } ∀ own cells @ 1.1 { ℵ rhs setValue(cell_θ,this, cell_θ); } ∀ own nodes @ 1.2 { ℵ rhs setValue(node_θ,this, node_θ); } ∀ own outer nodes @ 1.3{ ℵ rhs setValue(node_θ,this, option_theta_hot); } ∀ own outer faces @ 1.3{ ℵ rhs setValue(face_θ,this, option_theta_hot); } // **************************************************************************** // * alphaCells // **************************************************************************** ∀ own cells alphaCells @ 3.1{ ℝ αc, Σα=0.0; ∀ face { Σα+=sdivs/Cosθ; αc=α/cell_area; if (nbCell==1){ ℵ matrix addValue(cell_θ,this, face_θ,f, -αc); continue; } if (frontCell==*this) ℵ matrix addValue(cell_θ,this, cell_θ,backCell, -αc); else ℵ matrix addValue(cell_θ,this, cell_θ,frontCell,-αc); } Σα*=(δt/cell_area); ℵ matrix addValue(cell_θ,this, cell_θ,this, 1.0+Σα); } // **************************************************************************** // * betaCells // **************************************************************************** ∀ own cells betaCells @ 3.2{ Cell cP; Node nD,nE; ∀ face{ ℝ βc=β/cell_area; nD=(node(0).uniqueId()==nodeLowId)?node(0):node(1); nE=(node(0).uniqueId()==nodeLowId)?node(1):node(0); cP=(cell(0).uniqueId()==cellLowId)?cell(0):(nbCell==2)?cell(1):cell(0); if (*this!=cP) βc*=-1.0; ℵ matrix addValue(cell_θ,this, node_θ,nD, βc); ℵ matrix addValue(cell_θ,this, node_θ,nE, -βc); } } // **************************************************************************** // * Couplage Node-Cell: γ // **************************************************************************** ∀ own nodes gammaNodes @ 3.3{ Node nD; Cell cP,cQ; if (node_is_an_edge) continue; ∀ face { ℝ γn=γ/node_area; nD=(node(0).uniqueId()==nodeLowId)?node(0):node(1); cP=(cell(0).uniqueId()==cellLowId)?cell(0):(nbCell==2)?cell(1):cell(0); cQ=(cell(0).uniqueId()==cellLowId)?(nbCell==2)?cell(1):cell(0):cell(0); if (cP==cQ) fatal("Gamma", "Should have been filtered"); if (*this!=nD) γn*=-1.0; ℵ matrix addValue(node_θ,this, cell_θ,cP, γn); ℵ matrix addValue(node_θ,this, cell_θ,cQ, -γn); } } // **************************************************************************** // * Node-Node: δ // **************************************************************************** ∀ own nodes deltaNodes @ 3.4{ ℝ δn,Σδ=0.0; if (node_is_an_edge) continue; ∀ face { Node other_node = (node(0)==*this)?node(1):node(0); δn=δ/node_area; Σδ+=1.0/(Cosθ*sdivs); ℵ matrix addValue(node_θ,this, node_θ,other_node, -δn); } Σδ*=δt/node_area; ℵ matrix addValue(node_θ,this, node_θ,this, 1.0+Σδ); } // **************************************************************************** // * Conditions de Dirichlet // **************************************************************************** ∀ own outer faces @ 3.5{ ℵ matrix addValue(face_θ,this, face_θ,this, +1.0); } ∀ own outer nodes @ 3.6{ ℵ matrix addValue(node_θ,this, node_θ,this, +1.0); } // **************************************************************************** // * Aleph Solve // **************************************************************************** assembleAndSolve @ 4.0 { ℵ solve; } // **************************************************************************** // * Récupération des résultats // **************************************************************************** ∀ own cells @ 4.1 { cell_θ=ℵ lhs getValue(cell_θ,this); } ∀ own nodes @ 4.2 { node_θ=ℵ lhs getValue(node_θ,this); } // **************************************************************************** // * Sync & test for Quit // **************************************************************************** testForQuit @ 5.0{ synchronize(cell_θ); synchronize(node_θ); if (GlobalIteration >= option_max_iterations) exit; }